Project Information / Information sur le projet
Possible technologies involved / Technologies possibles impliquées: Microcontrollers, laser cutting, 3D printing, programming.
Project Type / Type de projet : General
Expected prototype budget / Budget prévu pour le prototype: Not available
Expected project cost / Coût prévu du projet cost: $50
Project Type / Type de projet : General
Expected prototype budget / Budget prévu pour le prototype: Not available
Expected project cost / Coût prévu du projet cost: $50
Client Information / Information sur le client
Please sign in to view client info.
Project background / Contexte du projet
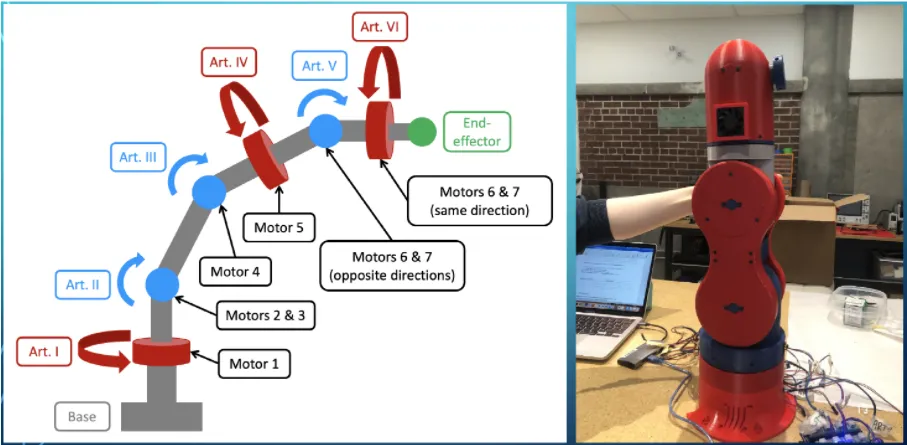
The National Defense intends on deploying robotic arms on Royal Canadian Navy warships to carry out minor tasks like painting logos on the hull of a ship. This would free up sailors to tend to other duties. A prototype is shown below which is made of 3D printed parts and uses an arduino mega to operate.
To perform tasks this arm needs to demonstrate precise movements using 6 degrees of freedom (DOF). To achieve a specific position and orientation in space it should use inverse kinematics which is the calculation of the angle of joints in a kinematic chain, like a robot arm, to reach the desired 3D coordinates.
To perform tasks this arm needs to demonstrate precise movements using 6 degrees of freedom (DOF). To achieve a specific position and orientation in space it should use inverse kinematics which is the calculation of the angle of joints in a kinematic chain, like a robot arm, to reach the desired 3D coordinates.
Using a smaller 3 DOF arm as a proof of concept (this will be provided), your task is to program the robotic arm and to design an end-effector for the arm. The arm should perform one or many of the following actions:
- Draw a shape or logo (end-effector to hold a pen)
- Sand blast or water blast a grid area (end effector to hold a water gun)
- Inspect a low oxygen space in 360deg (end-effector to hold a camera)
Past attempts / Tentatives précédentes
There has been no previous attempt to solving this problem. / Il n'y a pas de tentatives précédentes pour résoudre ce problème.
Inverse Kinematic Solver
PROPOSED BY
PROPOSÉ PAR
PROPOSÉ PAR
PROPOSED ON
PROPOSÉ LE
PROPOSÉ LE
Mar 9 2022
CONTACT
CATEGORIES
REPOSITORIES CREATED FROM THIS PROJECT PROPOSAL / PROJET CRÉÉ A
PARTIR DE CETTE PROPOSITION:
sort by/trier par