


DESCRIPTION
Code: Done in C++ to test every possible solution of our (x,y,z) coordinates. These coordinates were solved in our inverse kinematics calculations.
User Interface: The code allows us to control the arm with the use of a keyboard. The end-effector is controlled by pressing the letter d on your keyboard to open and close the claws.
Safety: Sweep of servo motor code opens the claws continuously which is impractical and unsafe. The code used implements the feature of controlling the opening of the claws by pressing a button, so the claws only move when you tell them to.
Inverse kinematics: We used a mathematical approach of matrices to solve for the (x,y,z) coordinates in symbolab. A diagram was drawn to find out where the theta, alpha, and lengths were on the z and x-axis. These values were put into a table. The values were then put into 3 matrices, one for each joint. Then we multiplied the 3 matrices in symbolab to get the (x,y,z) coordinates that were then put into our code to test every possible solution.
Sources for code: Pankaj Kumar Rathi posted code in teams for the robotic arm code, and with the help of our PM Luis Perez Acosta, we could write code that includes our inverse kinematics and parts of Pankaj's code.
The sweep of the servo motor code is from: https://forum.arduino.cc/t/how-to-make-a-servo-sweep-once-back-and-forth-with-the-same-keyboard-key/526048/2
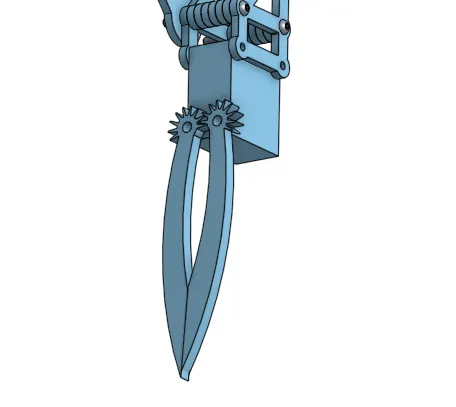
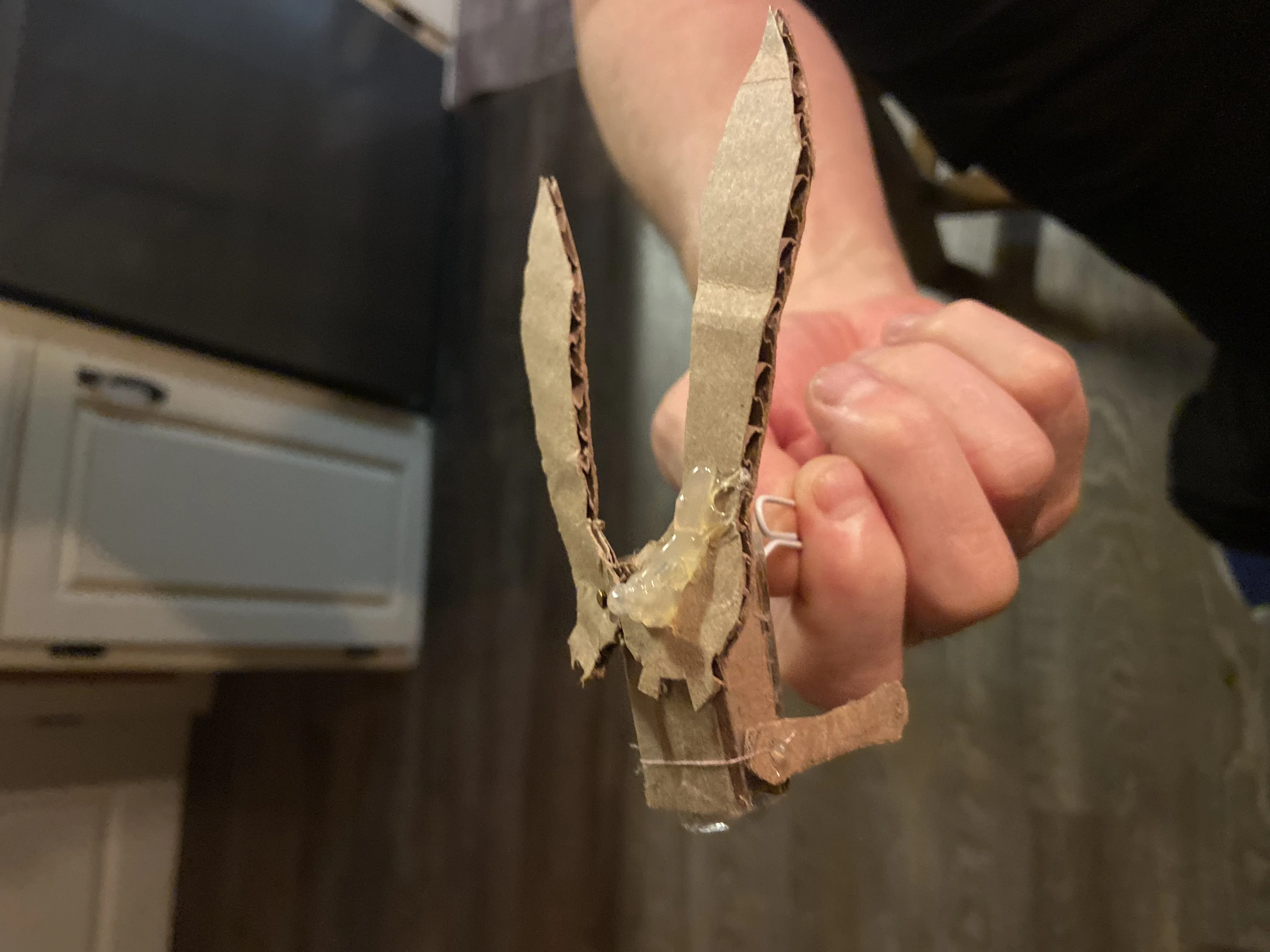
The idea of the gear claw is from: https://www.robotshop.com/ca/en/ez-robot-servo-gripper.html?gclid=Cj0KCQjw_4-SBhCgARIsAAlegrXumRhnhQR0n-0q-R0emKYAh9htyXiL9M0hjNlHjcqI8biGVIXpHMAaAkHDEALw_wcB
User Interface: The code allows us to control the arm with the use of a keyboard. The end-effector is controlled by pressing the letter d on your keyboard to open and close the claws.
Safety: Sweep of servo motor code opens the claws continuously which is impractical and unsafe. The code used implements the feature of controlling the opening of the claws by pressing a button, so the claws only move when you tell them to.
Inverse kinematics: We used a mathematical approach of matrices to solve for the (x,y,z) coordinates in symbolab. A diagram was drawn to find out where the theta, alpha, and lengths were on the z and x-axis. These values were put into a table. The values were then put into 3 matrices, one for each joint. Then we multiplied the 3 matrices in symbolab to get the (x,y,z) coordinates that were then put into our code to test every possible solution.
Sources for code: Pankaj Kumar Rathi posted code in teams for the robotic arm code, and with the help of our PM Luis Perez Acosta, we could write code that includes our inverse kinematics and parts of Pankaj's code.
The sweep of the servo motor code is from: https://forum.arduino.cc/t/how-to-make-a-servo-sweep-once-back-and-forth-with-the-same-keyboard-key/526048/2
The idea of the gear claw is from: https://www.robotshop.com/ca/en/ez-robot-servo-gripper.html?gclid=Cj0KCQjw_4-SBhCgARIsAAlegrXumRhnhQR0n-0q-R0emKYAh9htyXiL9M0hjNlHjcqI8biGVIXpHMAaAkHDEALw_wcB
C-11
PUBLISHED ON
Mar 14 2022
| PROJECT FILES | Download |
Deliverable B .pdf80 KB
Deliverable D.docx12988 KB
Deliverable F.docx4628 KB
Deliverable G.docx222 KB
Deliverable H.docx142 KB
DeliverableC.docx42 KB
Deliverable E.docx913 KB
CATEGORIES
EQUIPMENT
LICENSE
Creative Commons - Attribution
Linked to Project Proposal:
Comments
Top votes
Newest