.jpg)

Les Services alimentaires de l'Université d'Ottawa ont chargé la classe GNG1503B de concevoir un robot de cuisson autonome, abordable, auto-nettoyant, qui cuit les aliments dans un ordre particulier, à une température et une durée spécifique et précise.
En utilisant la pensée conceptuel comme méthode de conception et un budget de 100$, le groupe FB7 à concus un robot à petite échel et deux applications Java pour le contrôler.
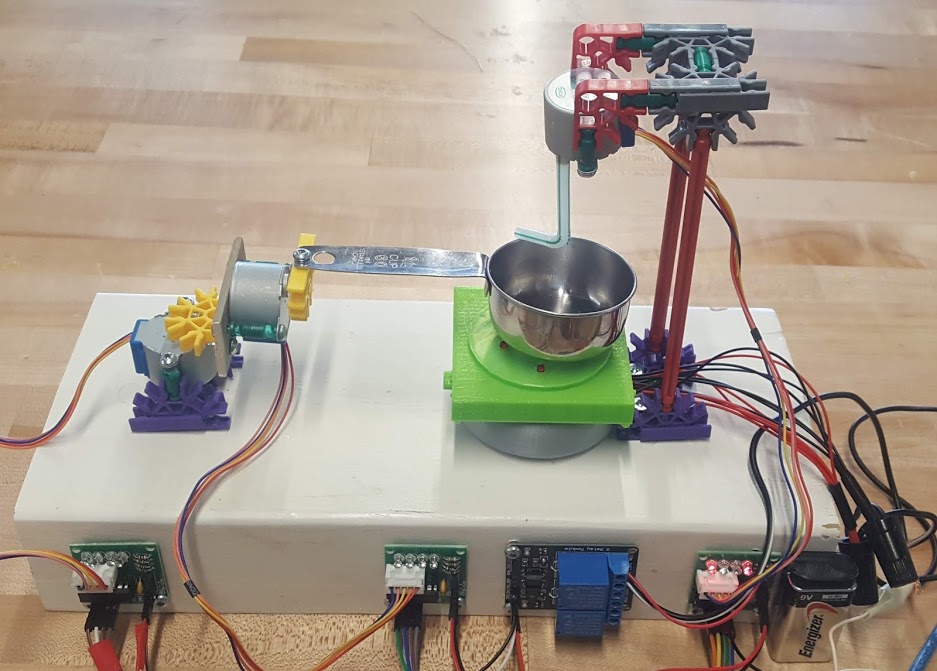
Le robot avait des capacité de manipuler une poêle avec un bras à deux articulations, un pour déplacer la poêle vers la gauche et la droite et l'autre pour la faire versé. De plus, le robot simulait le malaxage avec un mécanisme séparé à une articulation et simulait la cuisson avec des lumières DEL sur une plaque chauffante imprimé en 3D.
Le robot était contrôlé par deux applications Java. Le premier pour charger une liste d'ingrédients avec une durée et une température de cuisson spécifique à chacun. Le deuxième une interface de commande pour le consommateur qui permet de choisire les portions voulus. Tout c'est instruction étais envoyer à un ordinateur Arduino pour activer le robot de cuisson si et seulement si un capteur de pression était activé en plaçant un bol à côté du robot.
| PROJECT FILES | Download |